Projects
Software for Robot Racing Contest
Overview: Developed an autonomous racing software stack for a differential drive robot competing in a robot racing challenge. The system leverages ROS 2 for modular integration, real-time localization using AMCL, and autonomous waypoint-following using a combination of geometric path planning, Pure Pursuit control, and PID-based tuning for smooth and aggressive lap execution.
- Fastest Autonomous Lap Time: 1 minute 58 seconds
- Manual Control Benchmark: 1 minute 25 seconds
Key Features:
- ROS 2-Based Modular Architecture: Ensures scalable and real-time communication between localization, planning, and control modules.
- AMCL Localization on SLAM-Generated Maps: Enables reliable pose estimation in a pre-mapped indoor circuit environment.
- Waypoint Generation from Skeletonized Maps: Extracts centerline paths from occupancy grids using image processing techniques like skeletonization and spline smoothing.
- Pure Pursuit Controller with PID Tuning: Implements a lookahead-based path-following controller, fine-tuned with PID to reduce overshoot and oscillations.
- Looped Navigation: Supports continuous lap execution by looping through waypoint indices upon completion.
- Visualization & Debugging Tools: Real-time RViz markers and detailed logging tools for live monitoring and post-run analysis.
Technologies: ROS 2 Humble, Python, OpenCV, NumPy, RViz, SLAM Toolbox, AMCL, PID Controt, Pure Pursuit Algorithm
X-Spand: A Robot with Expanding Web-Wheels | Isaac Sim Showcase
Overview: Designed and simulated a novel mobile robot, X-Spand, featuring dynamic web-wheel structures with asymmetrical, retractable spokes. Built for adaptive ground contact and experimental locomotion, the robot showcases a unique mechanism where alternating X and + spokes change length to alter wheel geometry in real time. Simulated entirely in NVIDIA Isaac Sim.
- Simulation Platform: NVIDIA Isaac Sim
- Control Mode: Differential Drive with Spoke Actuation
- Primary Use Case: Adaptive Terrain Mobility & Research
Key Features:
- Extendable Web-Wheel Architecture: Each wheel includes 8 articulated spokes:
- Longer “+” spokes with extended rubber patches
- Shorter “X” spokes filling in traction gaps
- These alternate to maintain near-continuous rolling while enabling radius modulation.
- Asymmetrical Spoke Design: Designed for adaptive terrain contact - extend to overcome flat/higher surfaces, retract for tighter turns or stability.
- Isaac Sim Articulation Setup: Each spoke is implemented as an articulated joint within Isaac Sim’s USD framework. Control is applied through scripted joint targets.
Technologies: Isaac Sim (Omniverse), Fusion 360, Python, URDF/USD
Autonomous Drone for Flood Management
Overview: Researched and developed an autonomous drone system designed to assist in post-flood search and rescue operations. The drone employs a Pixhawk flight controller with integrated RGB cameras and GPS modules to streamline navigation and execute efficient mission planning and victim location reporting.
Key Features:
- Pixhawk and PX4 Autopilot Integration: Ensures precise control and autonomous flight capabilities.
- GNSS-Based Navigation: Utilizes GPS and EKF systems for navigation.
- Dual-Model Computer Vision System: Utilizes YOLOv8 and DETR-ResNet50 for aerial house detection and human detection in flood scenarios.
- Specialized Dataset Enhancement: Combined and annotated specialized datasets for tiny person detection in disaster scenarios.
Technologies: Pixhawk, GPS, YOLOv8, DETR-ResNet50, OpenCV, Python, ROS, Tensorflow
This is a private research project
Vidyaan – Autonomous Rover
Overview: Designed and implemented a robust autonomous navigation system featuring a custom hardware control architecture for precise, multi-level navigation.
Key Features:
- Multi-Level Navigation: Integrated A*, DWA, and RTABMap SLAM for effective path planning and obstacle avoidance.
- Dual-Mode Control: Manual mode with joystick control, emergency stop, and autonomous mode with hardware acceleration limits.
- Comprehensive Diagnostics: Motor current monitoring, encoder sanity checks, and emergency stop verification.
Technologies: ROS, Jetson, Python, C++, OpenCV, Gazebo, RViz, SLAM, RTabmap, Arduino
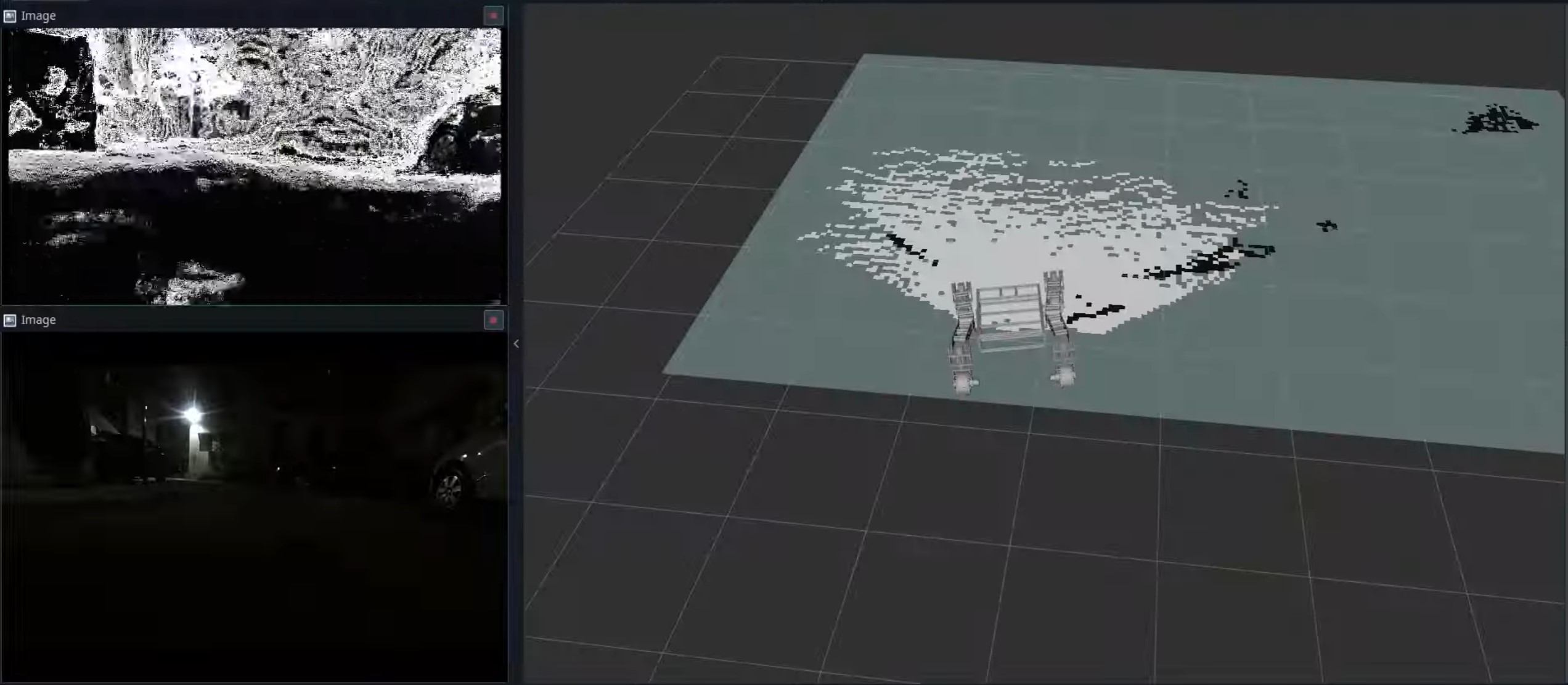
Modular Autonomous Navigation System (MANS) for Vehicles
Overview: Developed a Visual SLAM-based autonomous navigation system using stereo vision to provide real-time feature detection, 3D point cloud reconstruction, and vehicle localization.
Key Features:
- Modified A* Path Planning: Implemented an algorithm that accommodates Ackermann steering geometry, ensuring continuous curvature paths by incorporating Reeds-Shepp heuristic into A* path finding.
- Motion Planning Pipeline: Combines local trajectory optimization with global path planning for navigating dynamic environments.
Technologies: ROS, Jetson, Python, C++, OpenCV, Gazebo, PCL, Eigen

A.I.V.A – Cross-Platform Voice Assistant
Overview: Built a cross-platform voice assistant that utilizes advanced NLP techniques for intent recognition and task automation on both desktop and mobile devices.
Key Features:
- Context-Aware Conversation Management: Incorporates dialogue state tracking and custom API integrations for functionalities like email and call services.
- Custom API Integrations: Supports search queries and task management across different devices.
- Fine-tuned LLM usage: Utilises Decision Trees for Intent Recognition, Gemini for Response Framing, WhisperX for Voice Input, ElevenLabs for Vocal Response, PyGame for Desktop App Creation and a Siamese Network for Voice Authentication for sensitive tasks.
Technologies: Python, Node.js, Flask, Gemini, WhisperX, PyGame, Scikit-learn, Tensorflow, AWS
QUESC
Overview: Conducted research on applying Quantum Machine Learning (QML) for sound classification to improve performance and accuracy in processing audio data.
Key Features:
- Hybrid Model: Introduces a Quantized Hybrid Quantum-Classical Neural Network (QQNN) for environmental sound classification, combining classical and quantum layers to leverage quantum computing’s advantages.
- Quantization for Edge Devices: Employs quantization to reduce memory usage significantly, enabling compatibility with edge devices and making the model efficient for real-time applications.
Technologies: Qiskit, Pennylane, Tensorflow, Librosa, Python
3D Model Generation from Text Prompts
Overview: Explores openly available techniques to convert text prompts to 3D Models.
Key Features:
- Text-to-3D Generation: Implements multiple models, including Shap-E and Stable Diffusion, for converting text prompts into 3D models.
- Depth-to-3D Mapping: Explores using depth maps generated by Deep Learning Models to generate 3D Models.
Technologies: Python, NeRF, MiDaS, Stable Diffusion, PyTorch, Streamlit
Car Detective
Overview: Developed a computer vision-aided web application to predict car prices based on various features and images. Detects damages using pre-trained models and regression techniques to provide accurate pricing and condition assessments.
Key Features:
- Price Prediction Model: Utilizes advanced regression techniques to estimate car values based on visual and categorical data.
- Damage Detection: Employs fine-tuned pre-trained computer vision models like ResNet and VGG to identify and highlight damages in car images, improving accuracy in pricing.
Technologies: Python, Flask, React.js, MongoDB, Tensorflow, Scikit-learn
VerifyU
Overview: Built a web application that enables users to create personalized Digital Identity Cards by uploading government-related documents. To enhance privacy, access to documents requires both the Digital Identity Card and facial recognition authentication.
Key Features:
- OCR and Verification: Processes and verifies uploaded government documents to ensure authenticity.
- QR Code Generation: Hashes document details into a unique QR code, providing users with a secure digital identity.
- Dual-Layer Security: Requires both the QR-based Digital Identity Card and facial recognition for access to stored documents.
Technologies: Python, Django, React.js, Node.js, OpenCV, Tensorflow, PaddleOCR
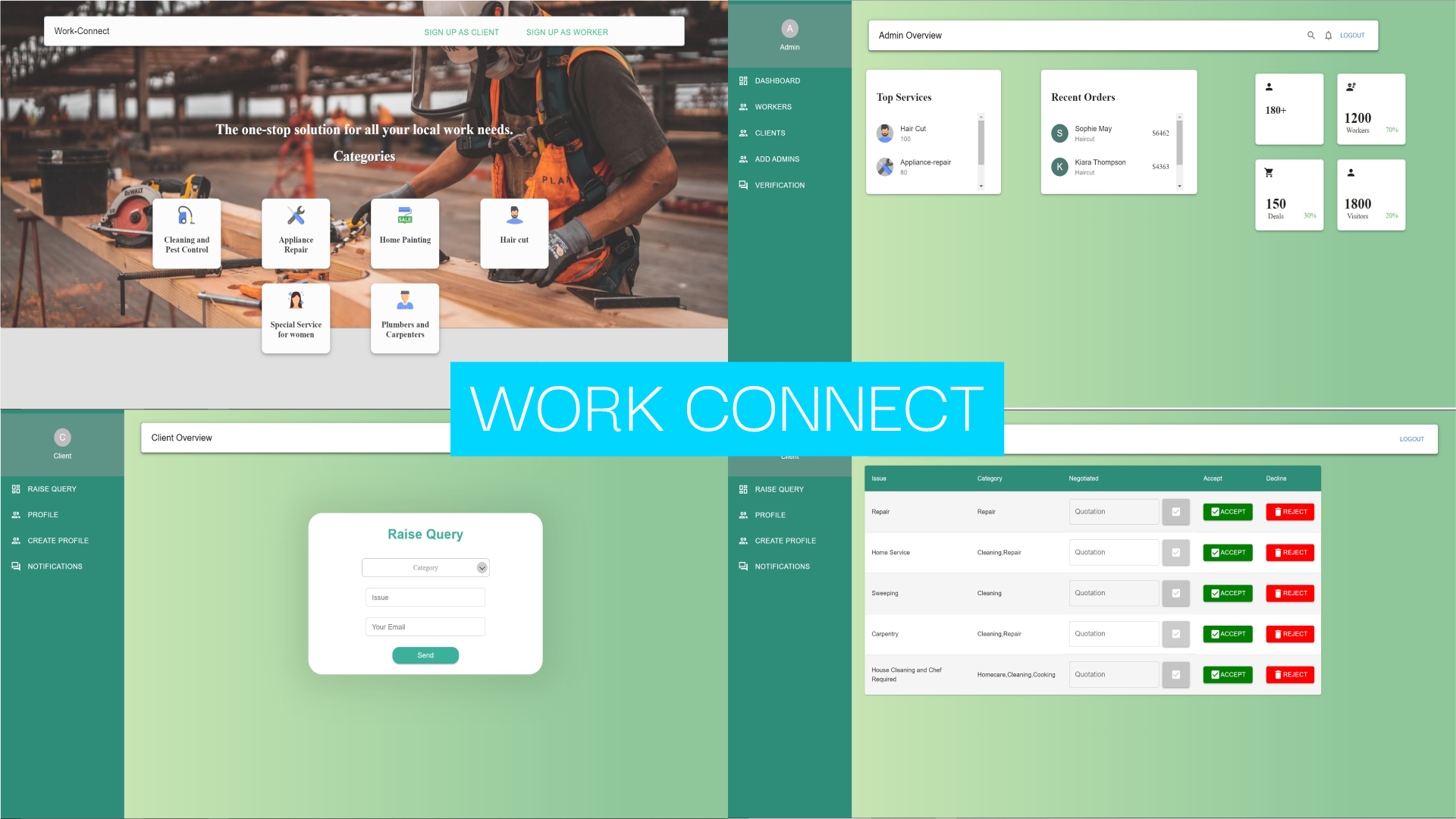
Work-Connect
Overview: Developed a web platform to connect local workers with clients seeking solutions to specific problems.
Key Features:
- Client-Worker Matching: Allows clients to post problems and workers to provide quotes, establishing a one-on-one connection.
- Quotation Management: Clients can review, accept, or reject quotes, providing transparency and control over the selection process.
- Enhanced Communication: Facilitates seamless interaction between clients and workers, optimizing decision-making for both parties.
Technologies: Node.js, React.js
Planets in Trouble
Overview: Developed A 2D Android Game made using the Unity Game Engine wherein the player needs to keep the planets from colliding using only a single finger.
Key Features:
- Simple Controls: Players can control planet movements using intuitive single-finger gestures, making the game accessible and easy to play.
- Dynamic Gameplay: Features increasingly challenging levels where the speed and number of planets increase, requiring quick reflexes and strategic planning.
- Vibrant Graphics and Sound: Utilizes colorful visuals and engaging sound effects to enhance the overall gaming experience.
Technologies: Unity Game Engine, C#
